Speaking and listening
Agent-based modelling, Konstanz, 2024
Henri Kauhanen
30 April 2024
Plan
- Last week, we ran out of time
- Better go slowly and build a solid foundation rather than try to cover as much ground as possible
- Hence, today:
- Finish last week’s material
- Introduce a little bit of new material: implementing interactions between variational learners
Dropping the environment
- So far, we’ve been working with the abstraction of a
LearningEnvironment:
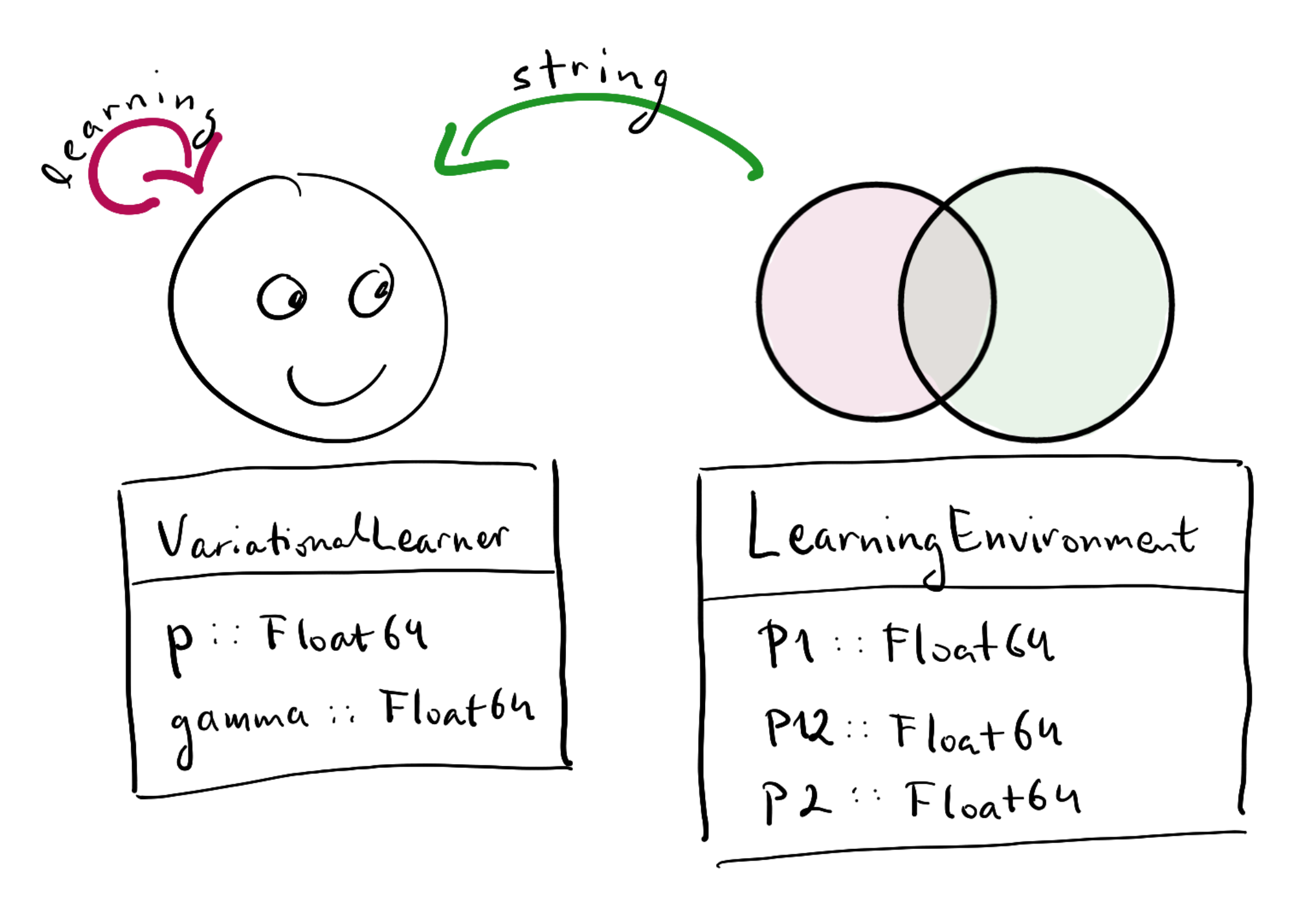
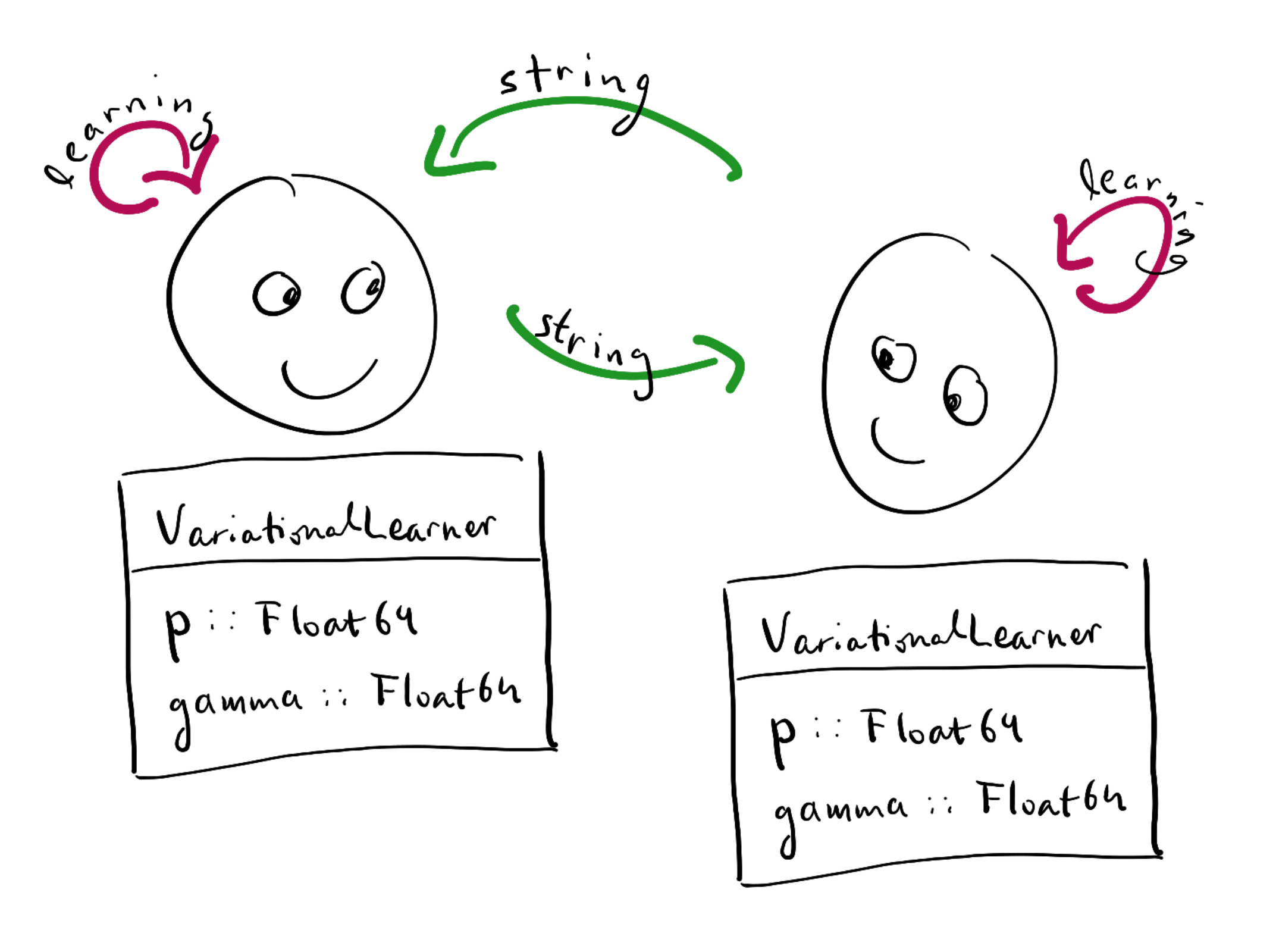
Dropping the environment
- We will now drop this and have two
VariationalLearners interacting:
Dropping the environment
- The probabilities
P1andP2now need to be represented inside the learner:
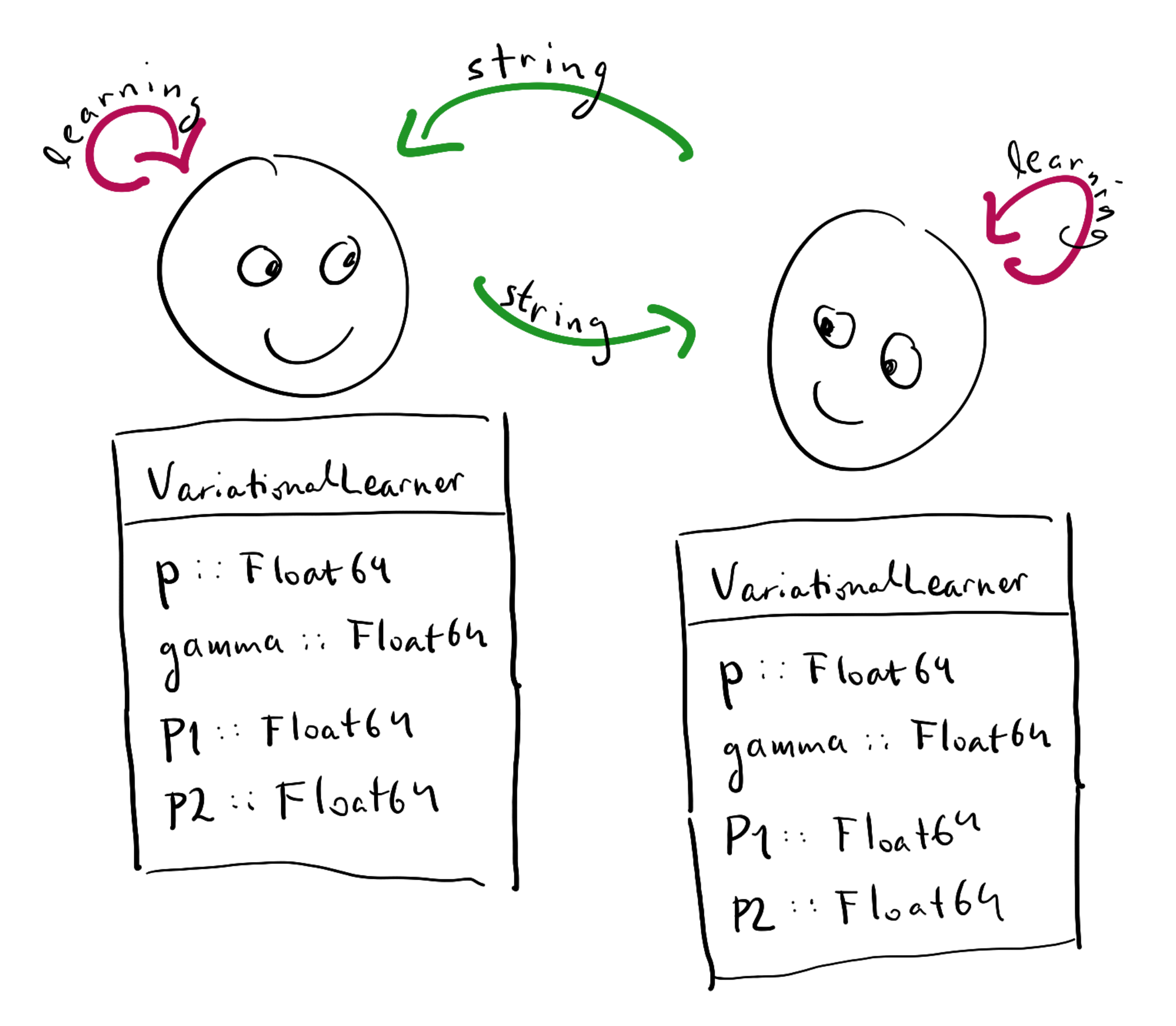
Dropping the environment
- Hence we define:
Exercise
Write three functions:
speak(x::VariationalLearner): takes a variational learner as argument and returns a string uttered by the learnerlearn!(x::VariationalLearner, s::String): makes variational learnerxlearn from stringsinteract!(x::VariationalLearner, y::VariationalLearner): makesxutter a string andylearn from that string
Exercise
Exercise
Answer (learn!)
function learn!(x::VariationalLearner, s::String)
g = sample(["G1", "G2"], Weights([x.p, 1 - x.p]))
if g == "G1" && s != "S2"
x.p = x.p + x.gamma * (1 - x.p)
elseif g == "G1" && s == "S2"
x.p = x.p - x.gamma * x.p
elseif g == "G2" && s != "S1"
x.p = x.p - x.gamma * x.p
elseif g == "G2" && s == "S1"
x.p = x.p + x.gamma * (1 - x.p)
end
return x.p
endlearn! (generic function with 1 method)Exercise
Picking random agents
rand()without arguments returns a random float between 0 and 1rand(x)with argumentxreturns a random element ofx- If we have a population of agents
pop, then we can userand(pop)to pick a random agent - This is very useful for evolving an ABM
Aside: for loops
- A
forloop is used to repeat a code block a number of times - Similar to array comprehensions; however, result is not stored in an array
A whole population
- Using a
forloop and the functions we defined above, it is now very easy to iterate or evolve a population of agents:
Exercise
Write the same thing using an array comprehension instead of a for loop.
Exercise
Answer
pop = [VariationalLearner(0.1, 0.01, 0.4, 0.1) for i in 1:1000]
[interact!(rand(pop), rand(pop)) for t in 1:100]100-element Vector{Float64}:
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
⋮
0.09801
0.099
0.10900000000000001
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099
0.099Next time
- Next week, we will learn how to summarize the state of an entire population
- This will allow us to track the population’s behaviour over time and hence model potential language change
- This week’s homework is all about consolidating the ideas we’ve looked at so far – the variational learner and basics of Julia